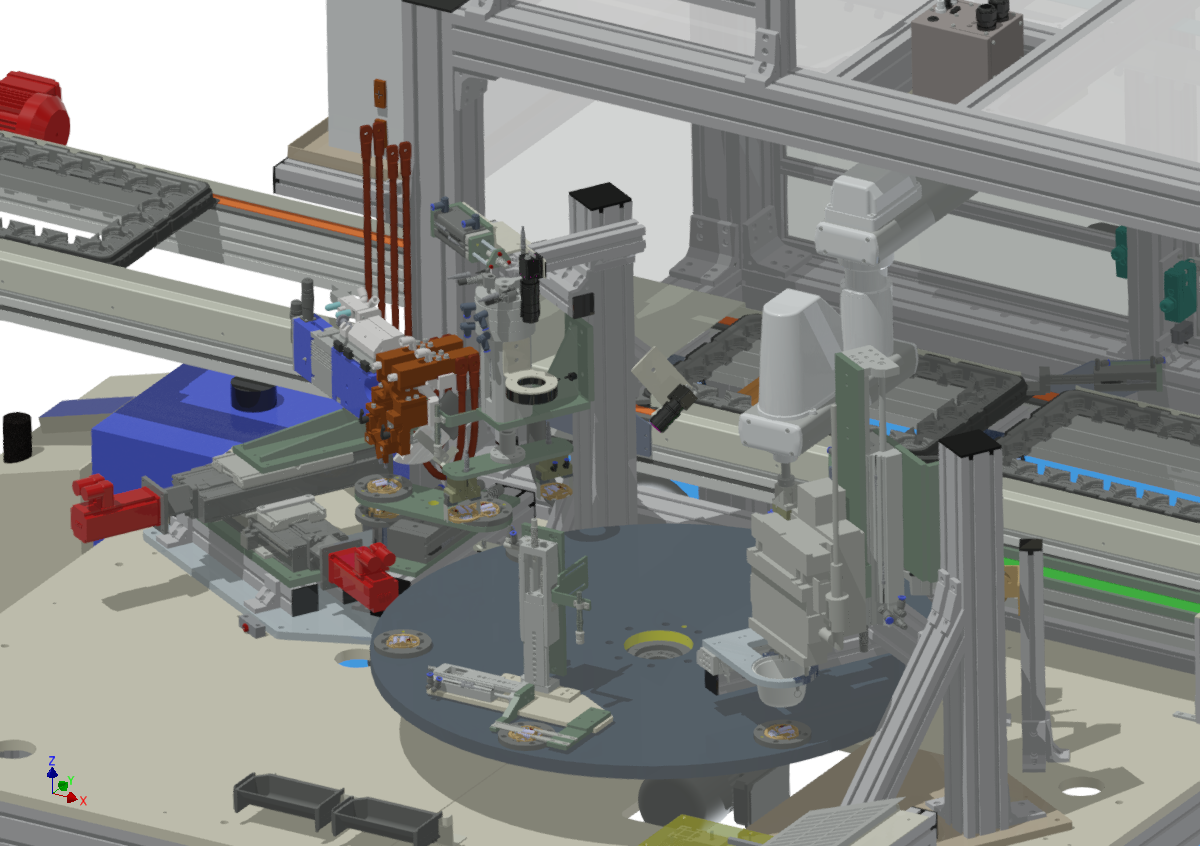
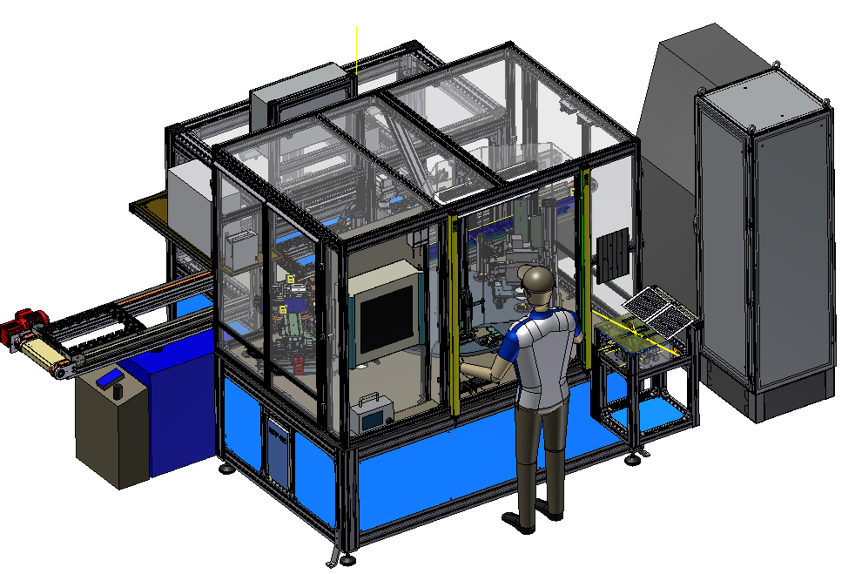
- Roboterzelle mit Durchtaktband für Paletten mit Platinenträger
- Vereinzelungs – und Spannvorrichtung für Paletten
- Scararoboter und Entladungsvorrichtung mit Ionenstrom
- Rundtakttisch mit 6 Stationen:
- Station 1: Be- und Entladen der Platinenträger mittels Scara Roboter
- Station 2: DMC Code scannen
- Station 3: Klebepunkte mit Dosiereinheit setzen
- Station 4: manuelle Einlage von zusätzlichen Bauteilen (Spulen+Kondensator)
- Station 5: Reservestation
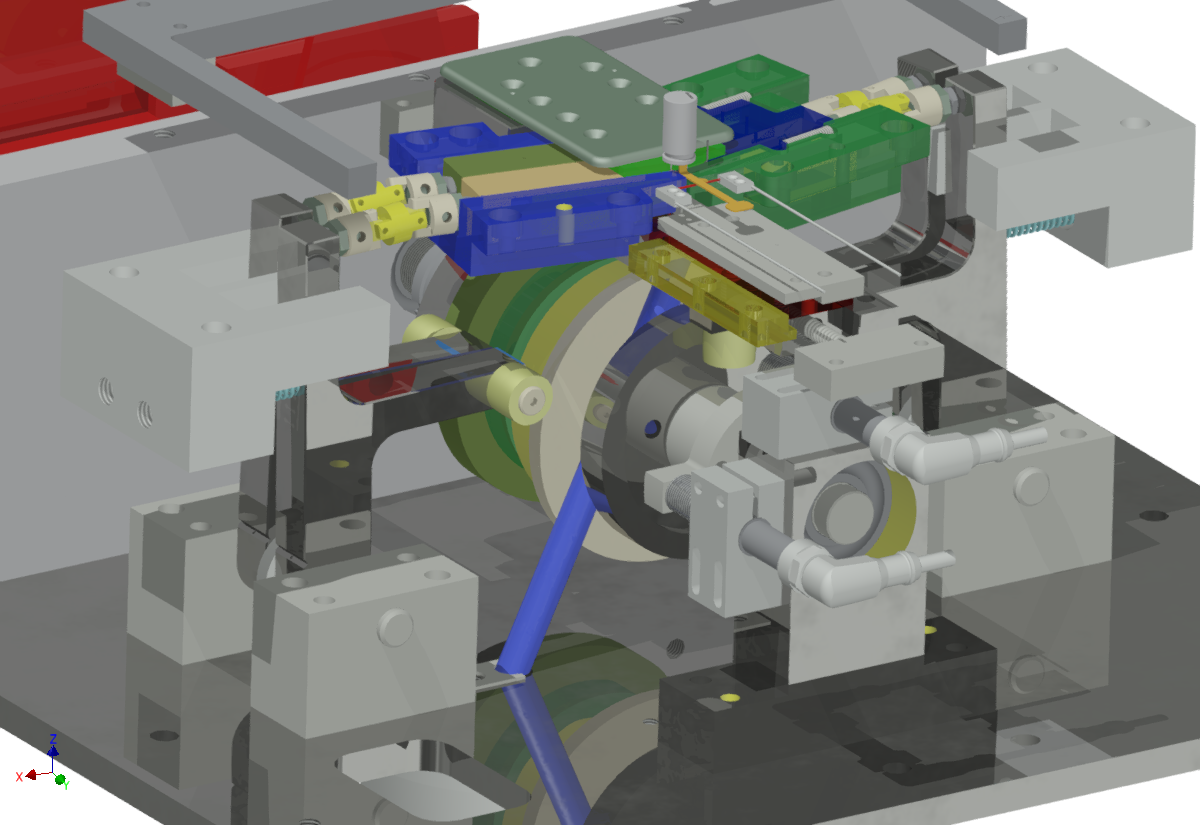
- Station 6: Kameraprüfung und Verschweißen aller Bauteile mit einer separaten Schweißzange an zwei Servoachsen (Kreuztisch)
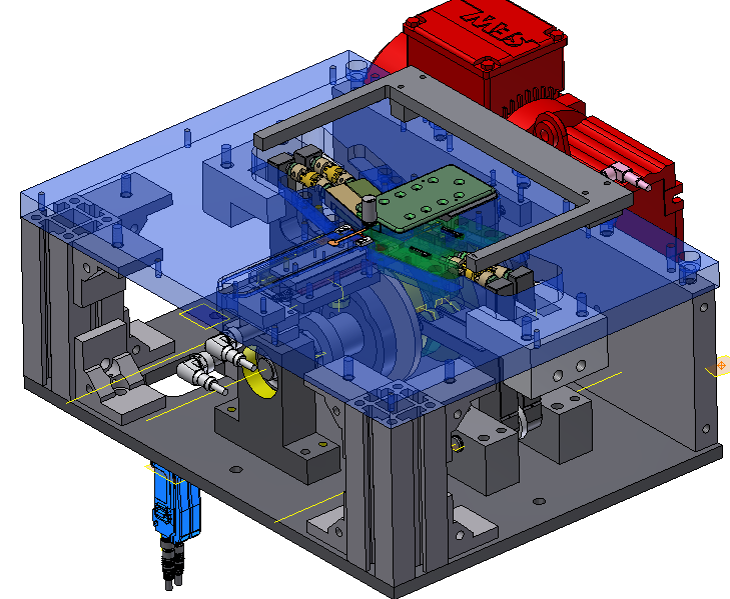
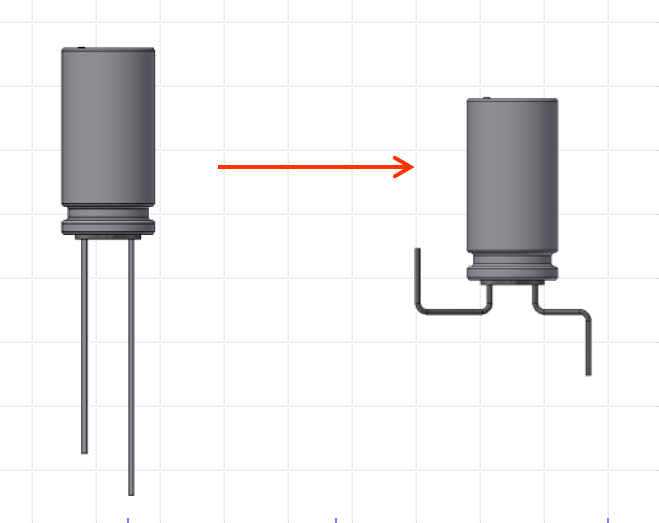
- Biegestation:
Bauteilvorbereitung – Kondensatordrähte werden in einer kurvengesteuerten Biegevorrichtung mehrfach gebogen- Einstecken des Kondensators durch Bediener
- Erkennung über kombinierte optische Sensorik
- Klemmen der Drähte
- Ablängen der Drähte
- Schrittweises biegen durch mehrere aufeinander folgende Schieber
- Klemmung lösen
- Entnahme nach ca. 2 Sekunden
CAD-System:
Baubetrieb:
Baujahr:
Inventor
MKF GmbH
2012
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}